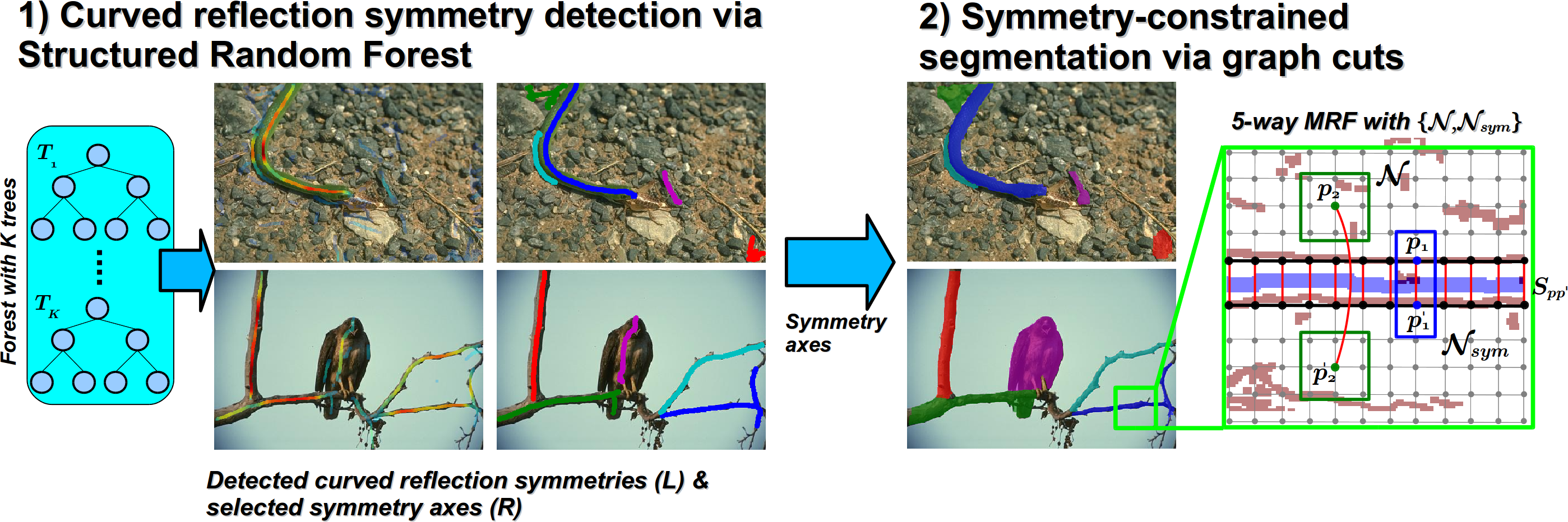
 Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Detection and Segmentation of 2D Curved Reflection Symmetric Structures. IEEE International Conference on Computer Vision, ICCV. 2015.
Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Detection and Segmentation of 2D Curved Reflection Symmetric Structures. IEEE International Conference on Computer Vision, ICCV. 2015.

I am a Ph.D. student at Department of Computer Science at University of Maryland, College Park. I am also affiliated to the Computer Vision Lab at UMIACS. My advisors are Yiannis Aloimonos and Cornelia Fermüller.
I am interested in Computer Vision, Computational Linguistics and how these two emerging fields combine to solve difficult problems that model human understanding, attention and recognition. I am also interested in robotic perception, especially on how we can model Vision and Language on mobile active agents.
I am a recipient of the Qualcomm Innovation Fellowship 2011, the UMD CS Department Fellowship award and DSO National Laboratories Post-graduate Scholarship.
In 2014, I was accepted into the UMD Clark School's Future Faculty Program, that focuses on grooming future teaching faculties in Engineering and Computer Science.
I am one of the main organizers for the UMD Computer Vision Student Seminars (CVSS) series.
I serve as a reviewer for several Computer Vision and Robotics conferences: CVPR, ICCV, ECCV, ICRA and IROS and journals: T-PAMI, IJRR, CVIU and IMAVIS.
Here's my updated CV and my Google scholar profile.
2015
2014
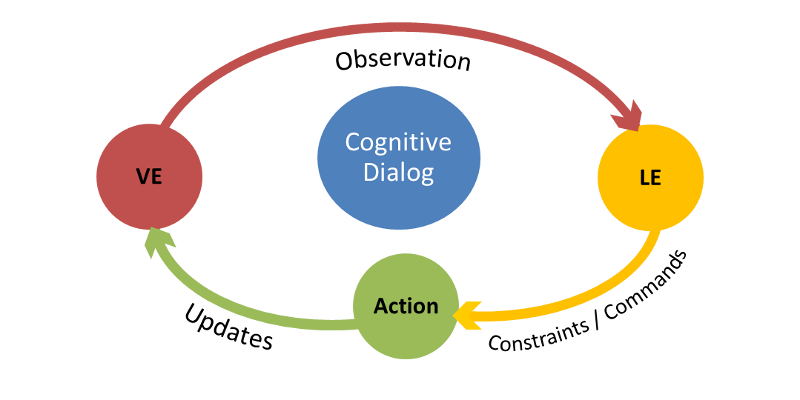
I am working on developing theories and algorithms that integrates Language with Vision beyond the semantic (label) level. This extends the previous work of using the "Cognitive Dialog" framework by considering the integration of vision and language across the entire spectrum of visual processes: from high-level (semantic) to low-level (signal). We are currently developing efficient methods for influencing low-level to mid-level visual processes: edge detection, contour grouping and segmentation, using high-level representations derived from language. More information can be found here.
Previous ResearchWe are actively using the Robot Operating System (ROS) to develop codes for the Pioneer 3-DX (previously Videre Erratic) robot platform. See our ROS hints to get acquainted. It contains useful README, links and sample ROS codes as well.
Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Detection and Segmentation of 2D Curved Reflection Symmetric Structures. IEEE International Conference on Computer Vision, ICCV. 2015.
 Francisco Barranco*, Ching L. Teo*, Cornelia Fermüller, Yiannis Aloimonos. Contour Detection and Characterization for Asynchronous Event Sensors. IEEE International Conference on Computer Vision, ICCV. 2015. (* indicates equal contribution)
Francisco Barranco*, Ching L. Teo*, Cornelia Fermüller, Yiannis Aloimonos. Contour Detection and Characterization for Asynchronous Event Sensors. IEEE International Conference on Computer Vision, ICCV. 2015. (* indicates equal contribution)
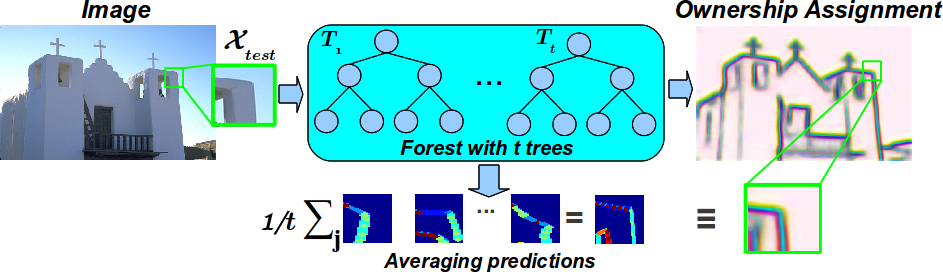 Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Fast 2D Border Ownership Assignment. IEEE Conference on Computer Vision and Pattern Recognition, CVPR. 2015. Oral
Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Fast 2D Border Ownership Assignment. IEEE Conference on Computer Vision and Pattern Recognition, CVPR. 2015. Oral
 Austin Myers, Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Affordance Detection of Tool Parts from Geometric Features. IEEE International Conference on Robotics and Automation, ICRA. 2015.
Austin Myers, Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Affordance Detection of Tool Parts from Geometric Features. IEEE International Conference on Robotics and Automation, ICRA. 2015.
 Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. A Gestaltist approach to contour-based object recognition: Combining bottom-up and top-down cues. The International Journal of Robotics Research, IJRR, vol 34(4-5):627--652, 2015. doi:10.1177/0278364914558493.
Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. A Gestaltist approach to contour-based object recognition: Combining bottom-up and top-down cues. The International Journal of Robotics Research, IJRR, vol 34(4-5):627--652, 2015. doi:10.1177/0278364914558493.
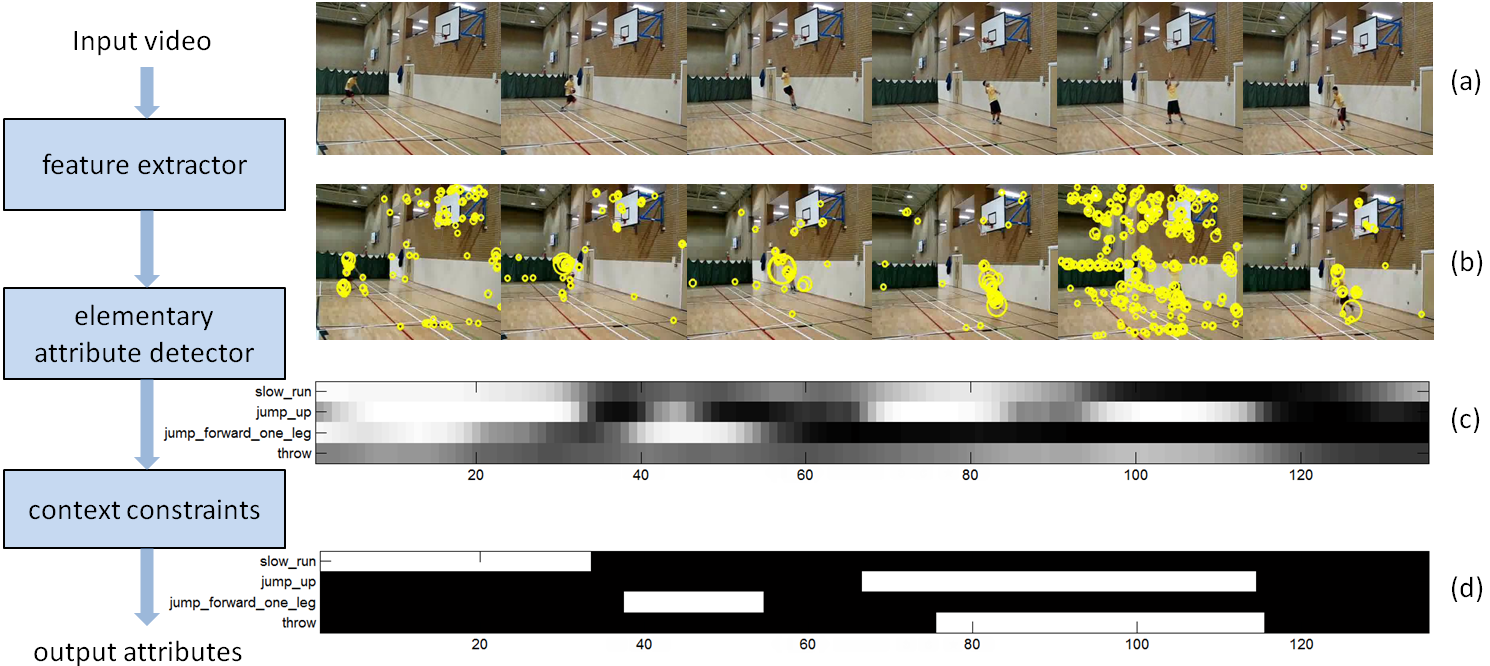 Xiaodong Yu, Ching L. Teo, Yezhou Yang, Cornelia Fermüller, Yiannis Aloimonos. Action Attribute Detection from Sports Videos with Contextual Constraints. British Machine Vision Conference, BMVC. 2013.
Xiaodong Yu, Ching L. Teo, Yezhou Yang, Cornelia Fermüller, Yiannis Aloimonos. Action Attribute Detection from Sports Videos with Contextual Constraints. British Machine Vision Conference, BMVC. 2013.
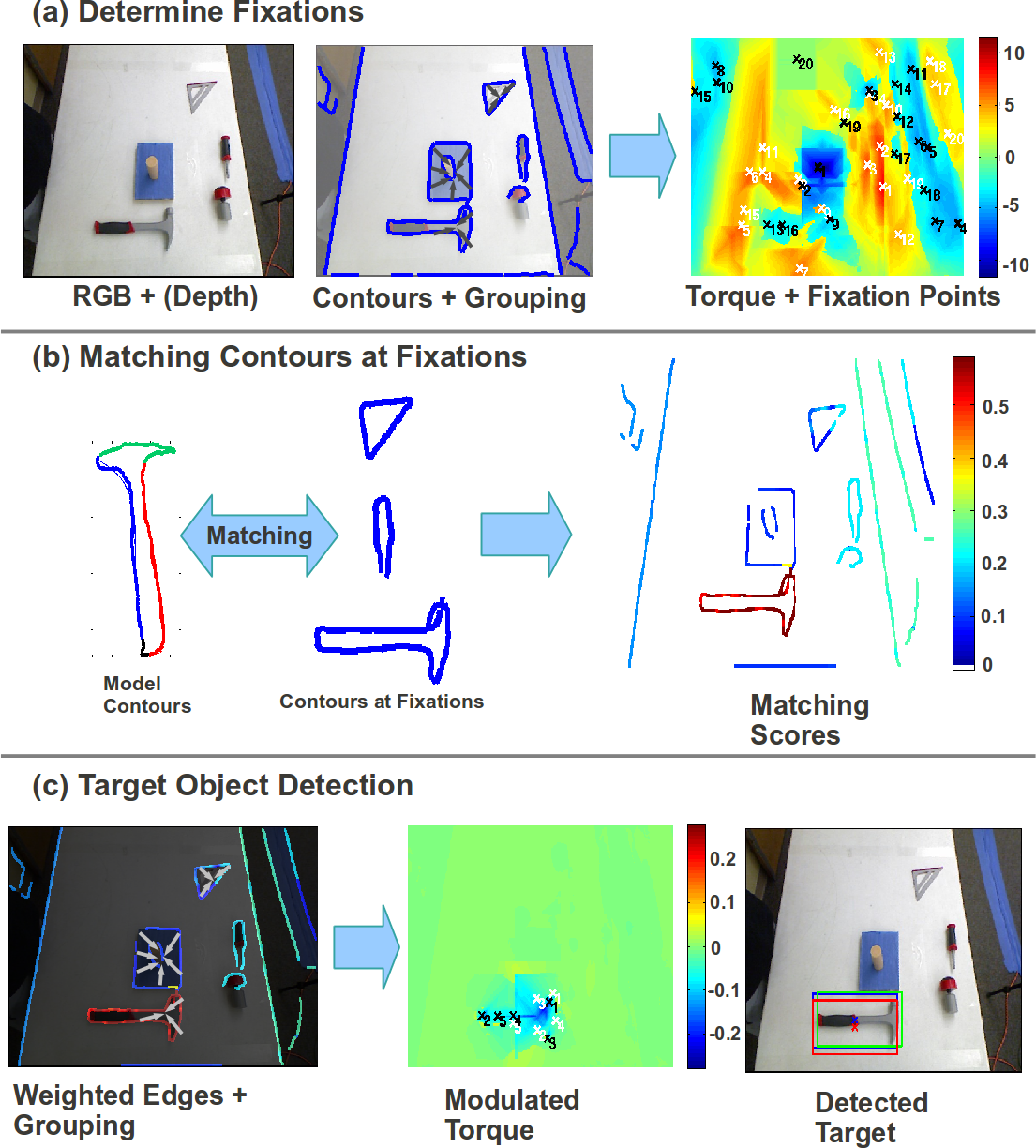
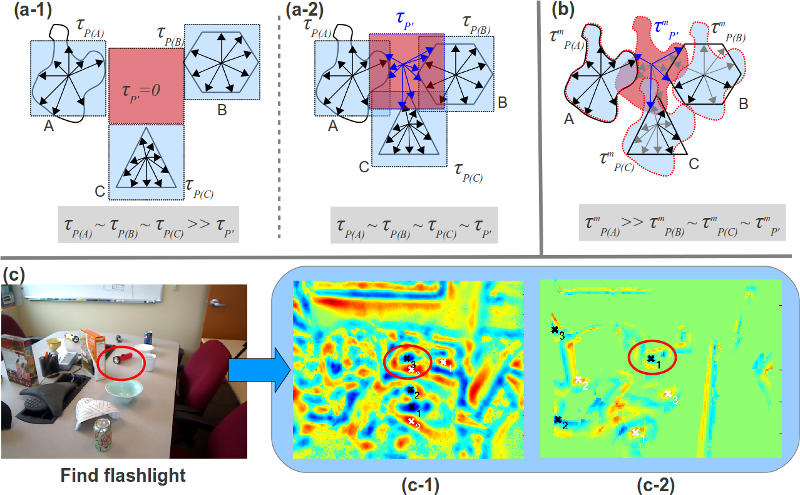 Ching L. Teo, Austin Myers, Cornelia Fermüller, Yiannis Aloimonos. Embedding High-Level Information into Low Level Vision: Efficient Object Search in Clutter. IEEE International Conference on Robotics and Automation, ICRA. 2013. Oral
Ching L. Teo, Austin Myers, Cornelia Fermüller, Yiannis Aloimonos. Embedding High-Level Information into Low Level Vision: Efficient Object Search in Clutter. IEEE International Conference on Robotics and Automation, ICRA. 2013. Oral
 Yezhou Yang, Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Robots with Language: Multi-Label Visual Recognition Using NLP. IEEE International Conference on Robotics and Automation, ICRA. 2013.
Yezhou Yang, Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos. Robots with Language: Multi-Label Visual Recognition Using NLP. IEEE International Conference on Robotics and Automation, ICRA. 2013.
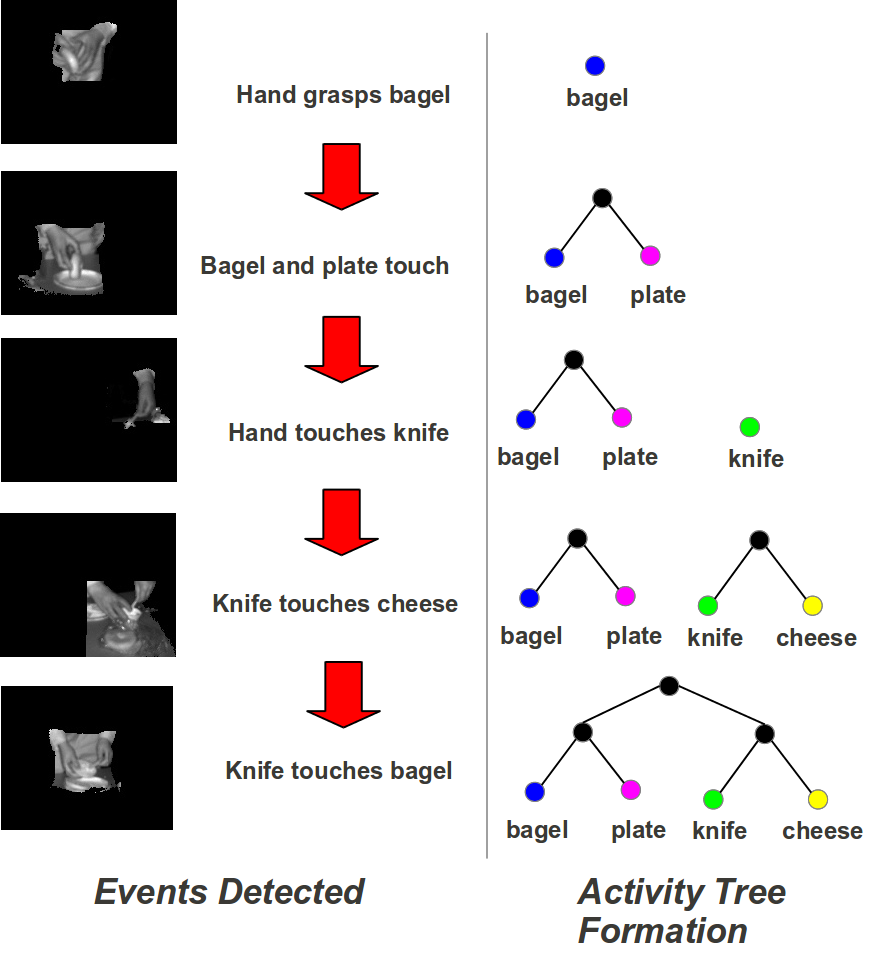 Douglas Summers-stay, Ching L. Teo, Yezhou Yang, Cornelia Fermüller, Yiannis Aloimonos. Using a Minimal Action Grammar for Activity Understanding in the Real World. IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS. 2012.
Douglas Summers-stay, Ching L. Teo, Yezhou Yang, Cornelia Fermüller, Yiannis Aloimonos. Using a Minimal Action Grammar for Activity Understanding in the Real World. IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS. 2012.
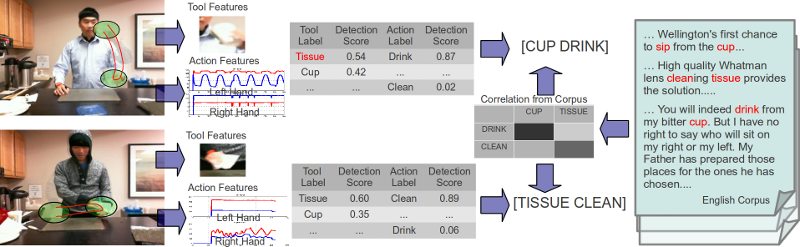
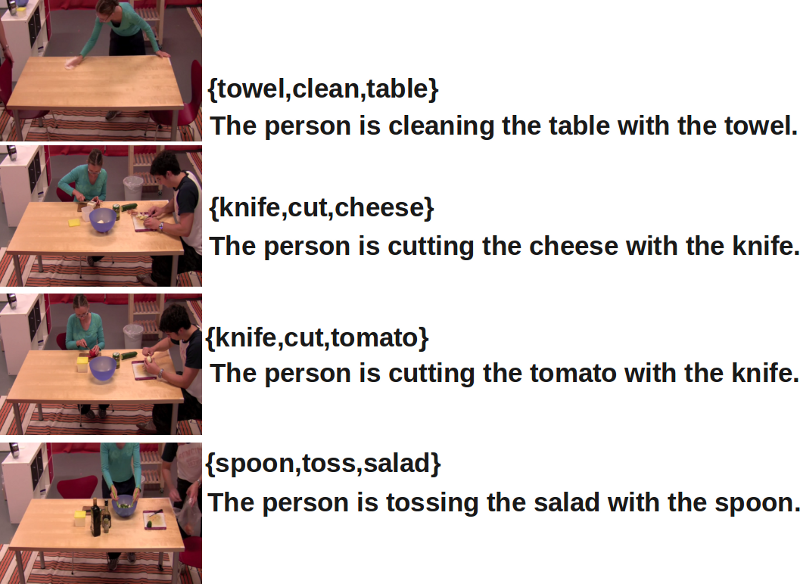
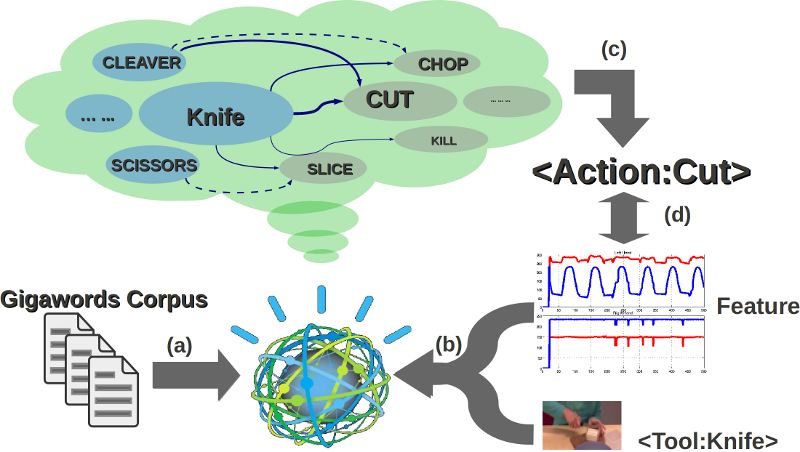 Ching L. Teo, Yezhou Yang, Hal Daumé III, Cornelia Fermüller, Yiannis Aloimonos. Towards a Watson That Sees: Language-Guided Action Recognition for Robots. IEEE International Conference on Robotics and Automation, ICRA. 2012.
Ching L. Teo, Yezhou Yang, Hal Daumé III, Cornelia Fermüller, Yiannis Aloimonos. Towards a Watson That Sees: Language-Guided Action Recognition for Robots. IEEE International Conference on Robotics and Automation, ICRA. 2012.
 Ching L. Teo, Yezhou Yang, Cornelia Fermüller, Yiannis Aloimonos. Synergistic Methods for using Language in Robotics. Performance Metrics for Intelligent Systems Workshop, PerMIS. 2012. Oral
Ching L. Teo, Yezhou Yang, Cornelia Fermüller, Yiannis Aloimonos. Synergistic Methods for using Language in Robotics. Performance Metrics for Intelligent Systems Workshop, PerMIS. 2012. Oral
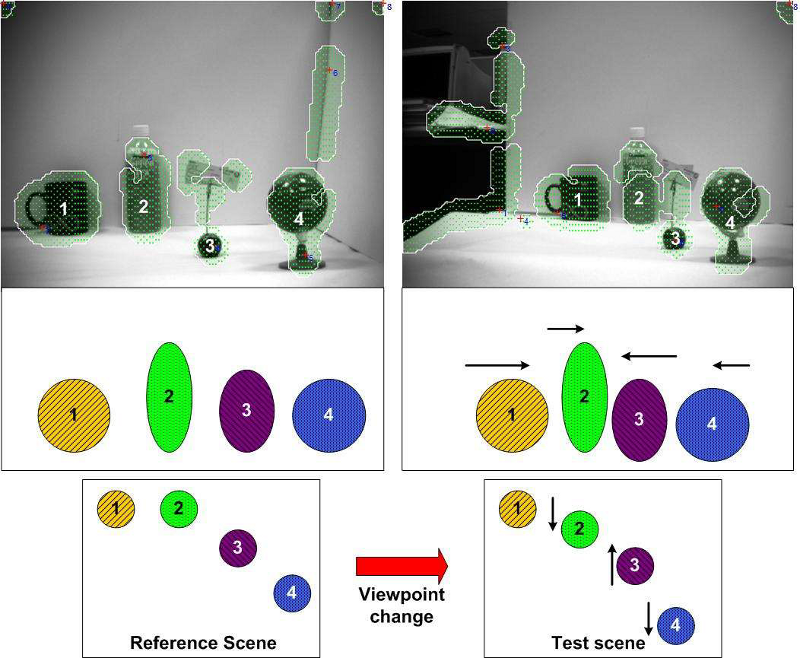
 Xiaodong Yu, Cornelia Fermüller, Ching L. Teo, Yezhou Yang, Yiannis Aloimonos. Active Scene Recognition with Vision and Language. IEEE International Conference on Computer Vision, ICCV. 2011.
Xiaodong Yu, Cornelia Fermüller, Ching L. Teo, Yezhou Yang, Yiannis Aloimonos. Active Scene Recognition with Vision and Language. IEEE International Conference on Computer Vision, ICCV. 2011.
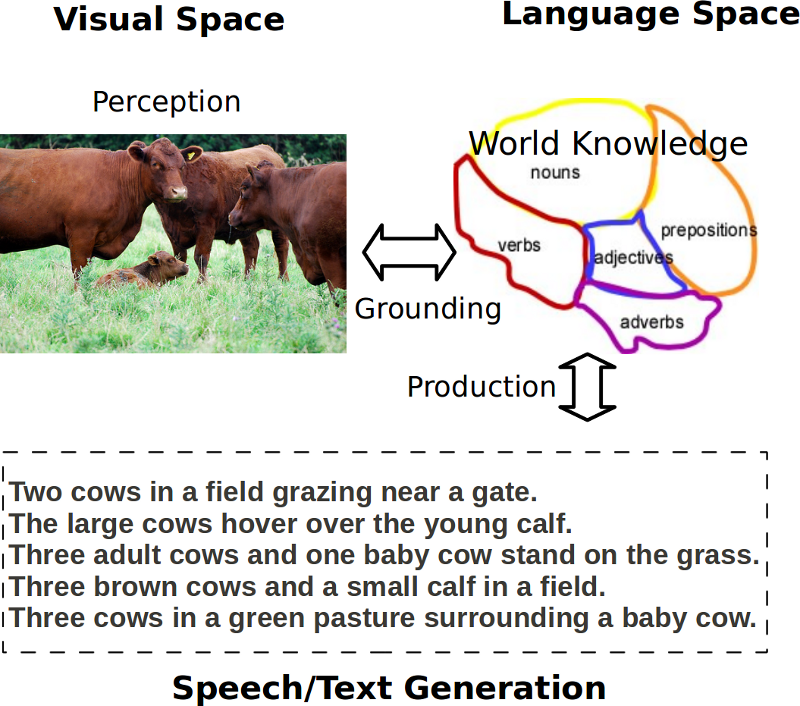 Yezhou Yang*, Ching L. Teo*, Hal Daumé III, Yiannis Aloimonos. Corpus-Guided Sentence Generation of Natural Images. Conference on Empirical Methods in Natural Language Processing, EMNLP. 2011. (* indicates equal contribution) Oral
Yezhou Yang*, Ching L. Teo*, Hal Daumé III, Yiannis Aloimonos. Corpus-Guided Sentence Generation of Natural Images. Conference on Empirical Methods in Natural Language Processing, EMNLP. 2011. (* indicates equal contribution) Oral
 Ching L. Teo, Yezhou Yang, Hal Daumé III, Cornelia Fermüller, Yiannis Aloimonos. A Corpus-Guided Framework for Robotic Visual Perception. AAAI Workshop on Language-Action Tools for Cognitive Artificial Agents. 2011.
Ching L. Teo, Yezhou Yang, Hal Daumé III, Cornelia Fermüller, Yiannis Aloimonos. A Corpus-Guided Framework for Robotic Visual Perception. AAAI Workshop on Language-Action Tools for Cognitive Artificial Agents. 2011.
 Ching L. Teo, S. Li, L-F. Cheong, J. Sun. 3D ordinal constraints in Spatial Configuration for Robust Scene Recognition. 19th International Conference on Pattern Recognition, ICPR. 2008.
Ching L. Teo, S. Li, L-F. Cheong, J. Sun. 3D ordinal constraints in Spatial Configuration for Robust Scene Recognition. 19th International Conference on Pattern Recognition, ICPR. 2008.
Robust Symmetry Detection in Natural Images, POCV 2014 spotlight presentation. June 2014. extended abstract slides
Robots Need Language, Qualcomm Innovation Fellowship Winners Day. Sep 2012. slides
The Telluride Neuromorphic Workshop 2011: Our Experience, UMD Computer Vision Students Seminar (CVSS). Feb 2012. slides
Integrating Language into Computer Vision, NUS Department of Mathematics Weekly Seminar. Jan 2012. slides
Robots Need Language: A computational model for the integration of vision, language and action, Qualcomm Innovation Fellowship Finalist Presentation. Apr 2011. Slides available upon request
Last Updated: January 08, 2016